Ultrasonic manipulator welding workstation
Welding robots are industrial robots engaged in welding, including cutting and painting. According to the International Organization for Standardization (ISO) industrial robot belongs to the definition of a standard welding robot, an industrial robot is a multi-purpose, repeatable, programmable automatic control manipulator (Manipulator) with three or more programmable axes for use in the field of industrial automation. In order to adapt to different uses, the mechanical interface of the robot’s last axis, usually a connection flange, can be connected to different tools or end effectors. Welding robots are welding tongs or welding (cutting) guns on the end axis flanges of industrial robots, so that they can be welded, cut or thermal sprayed.

With the development of electronic technology, computer technology, numerical control and robotics, automatic welding robots, since the 1960s began to be used in production, its technology has become increasingly mature, mainly has the following advantages:
1: Stabilize and improve the welding quality, can reflect the welding quality in the form of numerical values;
2: Improve labor productivity;
3: Improve the labor intensity of workers, can work in harmful environments;
4: Reduced requirements for workers’ operating technology;
5: Shorten the preparation cycle of product modification and reduce the corresponding equipment investment.
Therefore, it has been widely used in various industries.
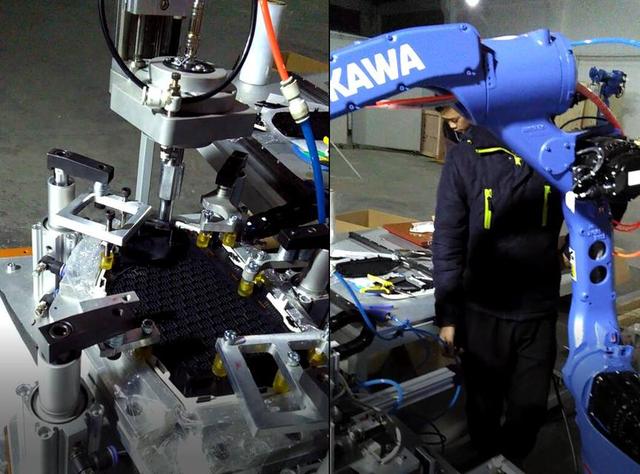
Welding robots mainly include robots and welding equipment. The robot consists of a robot body and a control cabinet (hardware and software). The welding equipment, taking arc welding and spot welding as an example, is composed of welding power supply, (including its control system), wire feeder (arc welding), welding torch (pliers) and other parts. For intelligent robots, there should also be sensing systems, such as laser or camera sensors and their control devices. Figures 1a and b show the basic composition of arc welding robots and spot welding robots.

Welding robots produced in various countries in the world are basically articulated robots, and most of them have 6 axes. Among them, the 1, 2, and 3 axes can send the end tool to different spatial positions, while the 4, 5, and 6 axes solve the different requirements of the tool attitude. The mechanical structure of the welding robot body has two main forms: one is a parallelogram structure, and the other is a side-mounted (pendulum) structure, as shown in Figures 2a and b. The main advantage of the side-mounted (pendulum) structure is that the upper and lower arms have a large range of motion, so that the robot’s working space can reach almost a sphere. Therefore, this robot can work upside down on the rack to save floor space and facilitate the flow of ground objects. However, this kind of side-mounted robot, 2 and 3 axes for cantilever structure, reduce the stiffness of the robot, generally suitable for robots with small loads, for arc welding, cutting or spraying.The upper arm of the parallelogram robot is driven by a lever. The lever and the lower arm form two sides of a parallelogram. Hence the name. The early development of parallelogram robots has a relatively small working space (limited to the front of the robot) and is difficult to work upside down. However, the new parallelogram robot (parallel robot) developed since the late 1980s has been able to expand the working space to the top, back and bottom of the robot, and there is no stiffness problem of the measured robot, so it has been generally valued. This construction is suitable not only for light but also for heavy robots. In recent years, most of the robots for spot welding (load 100~150kg) use robots in the form of parallelogram structures.


Solving problems for customers is our eternal pursuit!
WELDHOT Brain Writing


I do not understand
I can not recollect, where I about it read.